Intelligent RoboRock automation with Home Center 3

In this blog I'll take you through the process and technical implementation to make your Roborock vacuum more intelligent with the Home Center 3.
Summary
In 2018, I automated the vacuuming by our Roborock vacuum cleaner in such a way that if no one was home during the day, it automatically started vacuuming. If we were home all day, the vacuum cleaner would automatically make its rounds at night. This automation flow I created with Node-Red because it was very easy to implement.
Mid 2021 I found on the French Fibaro Forum a topic about a Quick App for the Xiaomi Roborock Vacuum cleaners. Forum member Lazer ported the Virtual Device that was developped for the Home Center 2.
This got me exited to implement native control of the Roborock Vacuum on my Home Center 3 and to level up the intelligence of my home automation.
Goals
- Full control from HC3 scenes and Quick Apps without third party tooling.
- Vacuum automatically when everybody left the house.
- Automatically dock the vacuum cleaner when someone arrives at home while it is still busy.
- Keep track of how many square meters have been vacuumed to determine whether the entire house has been vacuumed.
- When everyone has left again and the vacuum cleaner was not yet ready, the vacuuming starts again.
- Vacuum at night if the entire house is not vacuumed during the day.
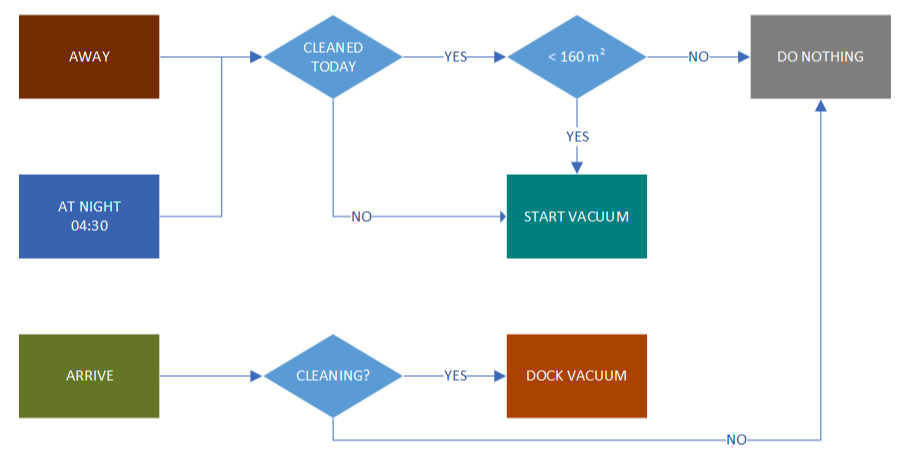
I visualised the flow in a diagram:
TL;DR
- Obtain the Xiaomi Roborock token,
- Install and configure Quick App,
- Change QuickApp code to set clean area to a Global Variable,
- Add control parameters to presence detection and night scenes.
Prerequisites
Obtain the Xiaomi Roborock token
To connect to the Xiaomi Roborock you’ll need to obtain the token of your vacuum cleaner. The method of obtaining the token changes over time (Xiaomi strengthened the security), if you Google how to get it, you’ll be fine.
Download the Xiaomi Roborock Quick App
Download the Xiaomi Roborock Quick App from this topic on the French Fibaro Forum. Attention, there is an 2.01 update on page 2!
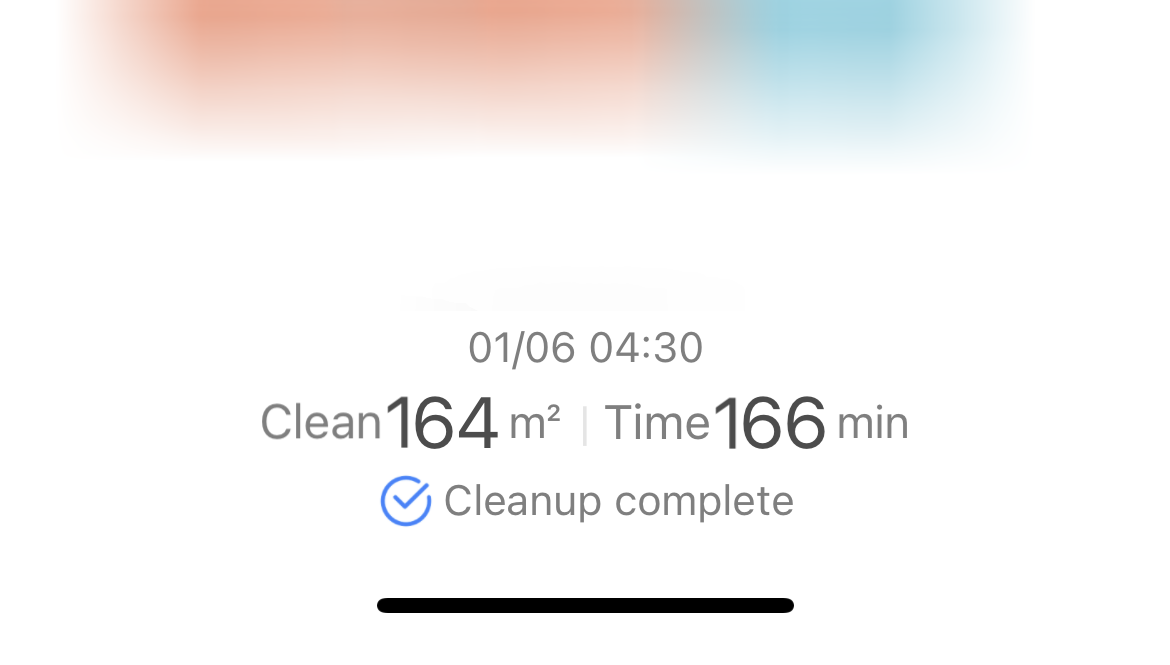
Determine the area of your home
To determine the area that the vacuum cleaner needs to vacuum in order to have cleaned your entire home you open the Xiaomi Home App on your Android or iPhone and view the cleaning history of the device. Select an option with a full cleanup and the map appears on the screen. At the bottom you’ll find the square meters you’ll need later on, so write it down.
Install the Quick App
- Start your favorite browser and open your Home Center 3 dashboard by typing the correct URL for your HC3,
- Go to Settings and Devices,
- Click the blue + icon to add a new device,
- In the Add Device dialog click on Other Device,
- Choose Upload File and upload the
.fqafile downloaded from the French Fibaro Forum, -
Go to the device and edit the Quick App variables to set them to your Roborock settings:
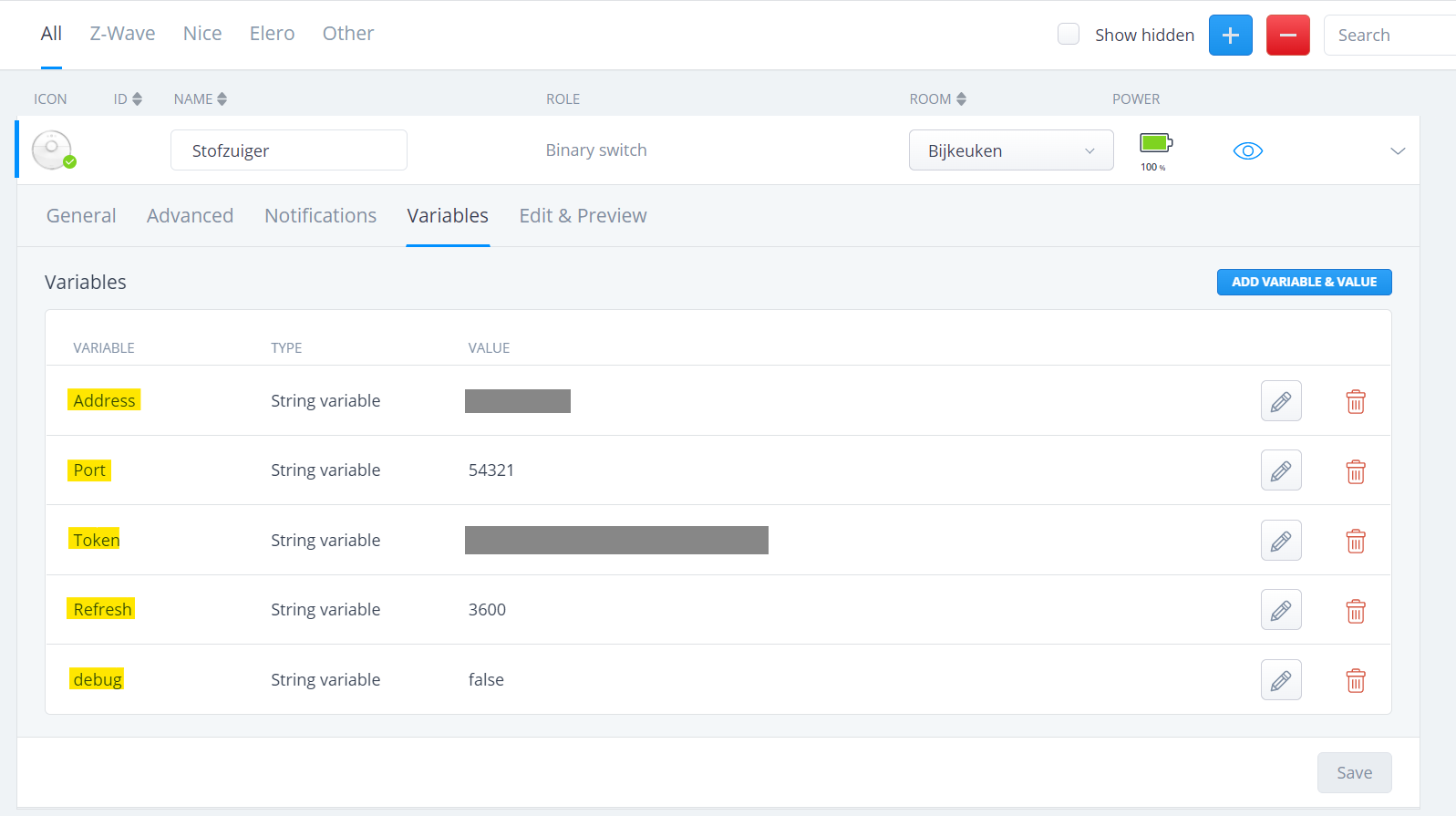
I’ve set the refresh interval to 1 hour because that is enough for my usage. Don’t set it lower than 10 seconds, because the processor of the HC3 will be too busy with encryption/decryption operations of the frames exchanged with the robot and it will slow down.
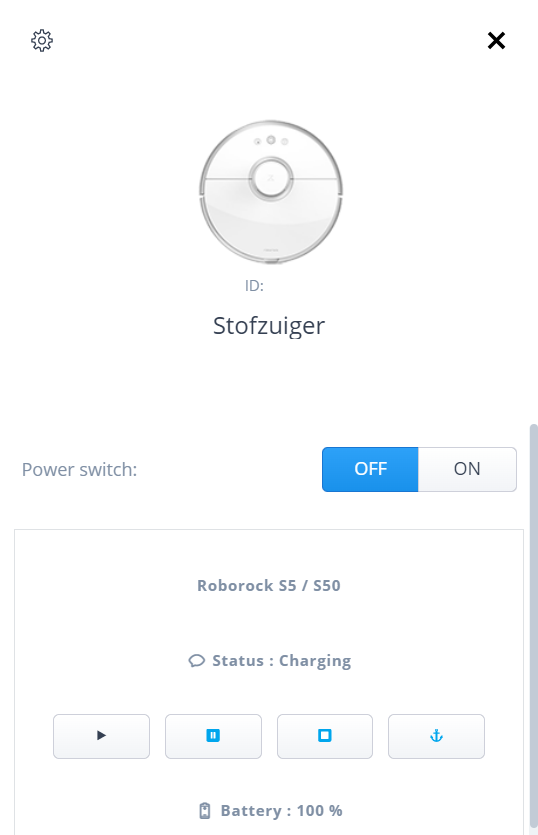
If you have configured the Quick App correctly it looks like this:
Create a Global Variable
The goal is to check whether the entire house has been vacuumed when away or at night and vacuum (again) if necessary.
To read the square meters that have been vacuumed in scenes or other Quick Apps I created a Global Variable named VacuumState and set its value to: 0;1234.
The 0 before the semicolon indicated if the Roborock already did a cleaning session today. The 1234 after the decimal will be replaced by the square meters from the last cleaning session after I made the adjustments for this in the Quick App.
In the following screenshot you see the Global Variable I created and it’s updated with 46.8075 square meters:
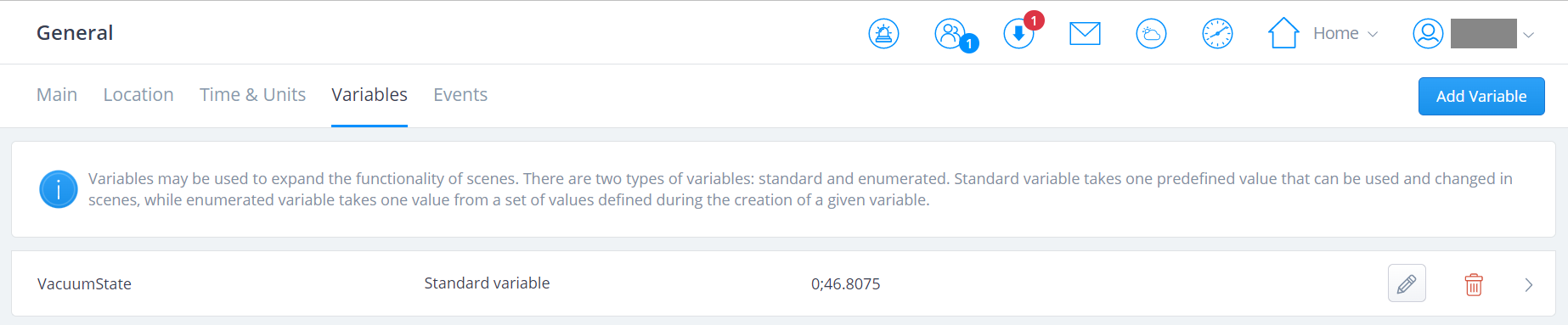
This indicates the vacuum will start again when everybody leaves home or at night because the total clean area is 164 m2.
Edit the Xiaomi Roborock Quick App
To refresh the Global Variable at every Roborock status refresh I added the following code on line 386 in the Xiaomi:getStatus(...) function:
local gvarVacuumStateState = fibaro.getGlobalVariable("VacuumState")
local vacDone, vacState = gvarVacuumStateState:match("(.*);(.*)")
local newVacState = tostring((result.clean_area or 0)/1000000)
fibaro.setGlobalVariable("VacuumState", vacDone .. ";" .. newVacState)
You can work with two Global Variables for status and square meters, but I like to minimize my variables and save it on one line. It’s easy in Lua code to split it to two local variables.
Presence detection Lua scene
On my HC3 I have a presence detection scene that runs when somebody leaves or arrives at home. I added the following Lua code when the everybody left at home condition is triggered:
local gvarVacuumStateState = fibaro.getGlobalVariable("VacuumState")
local vacDone, vacState = gvarVacuumStateState:match("(.*);(.*)")
if (tonumber(vacDone) == 0) then
fibaro.setGlobalVariable("VacuumState", "1;" .. vacState)
fibaro.call(200, "clean") -- Turn on vacuum.
fibaro.debug("Scene1", "Start away vacuum downstairs...")
elseif (tonumber(vacDone) == 1 and tonumber(vacState) < 160) then
fibaro.setGlobalVariable("VacuumState", "1;" .. vacState)
fibaro.call(200, "clean") -- Turn on vacuum.
fibaro.debug("Scene1", "Start away vacuum downstairs again because previous clean was not done...")
else
fibaro.debug("Scene1", "No away vacuum cleaning needed. Already done.")
end
This code checks if a full cleanup is done today by checking how many square meters the robot vacuum cleaner has covered today. If it is less than 160 it will clean again.
When the first person arrives at home you can simply run fibaro.call(244, "dock") to automatically dock the vacuum.
Night scheduler Quick App
For scheduled tasks I created a Quick App which runs automations at specific times. Basically it is a simple time clock. If no one has been out of the house all day vacuum cleaner was not turned on manually, then I want to clean the house at 04:30 at night. The following code checks if the Night profile is active on the HC3 and starts the cleanup if the conditions are met:
function getActiveProfileName()
local profiles = api.get("/profiles")
for _, profile in ipairs(profiles.profiles) do
if (profile.id == profiles.activeProfile) then
return profile.name
end
end
end
function QuickApp:myScheduler()
if (os.date("%H:%M") == "04:30") then
local activeProfile = getActiveProfileName()
self:debug("Profile: ".. activeProfile .. " is active")
if (activeProfile ~= "Vacation") then
local gvarVacuumStateState = fibaro.getGlobalVariable("VacuumState")
local vacDone, vacState = gvarVacuumStateState:match("(.*);(.*)")
if (tonumber(vacDone) == 0) then
fibaro.call(200, "clean") -- turn vacuum bijkeuken.
self:debug("Start nightly vacuum downstairs...")
elseif (tonumber(vacDone) == 1 and tonumber(vacState) < 160) then
fibaro.setGlobalVariable("VacuumState", "0;" .. vacState)
fibaro.call(200, "clean") -- turn vacuum bijkeuken.
self:debug("Start nightly vacuum downstairs again because previous clean was not done...")
end
end
end
local s = os.date("%S")
local timeout = 60000 - (s * 1000)
fibaro.setTimeout(timeout, function() -- wait 1 minute
self:myScheduler()
end)
end
function QuickApp:onInit()
self:debug("onInit")
self:myScheduler()
end
This Lua function loops every minute with the code:
local s = os.date("%S")
local timeout = 60000 - (s * 1000)
fibaro.setTimeout(timeout, function() -- wait 1 minute
self:myScheduler()
end)
That it!
In this article I showed you how to implement native control of the Roborock Vacuum on the Home Center 3 and level up the intelligence of your robot vacuum in your smarthome.
Explore more like this
Window/Door Notifier QuickApp for HC3
We all like fresh air, but if the windows are open for too long, you are wasting energy because your HVAC is heating up the rooms for nothing.

Why I use Shelly next to my FIBARO devices in my smart home
Building a smart home can be overwhelming with so many devices and protocols to choose from. In this blog, I’ll share my experience why I use Shelly next to my...
